2022 Annual Meeting
(299g) An Advanced MPC for Nonlinear Large-Scale Dynamic Systems Based on Data-Driven POD/ANNs Method
Author
Weiguo Xie - Presenter, University of Minnesota - Duluth
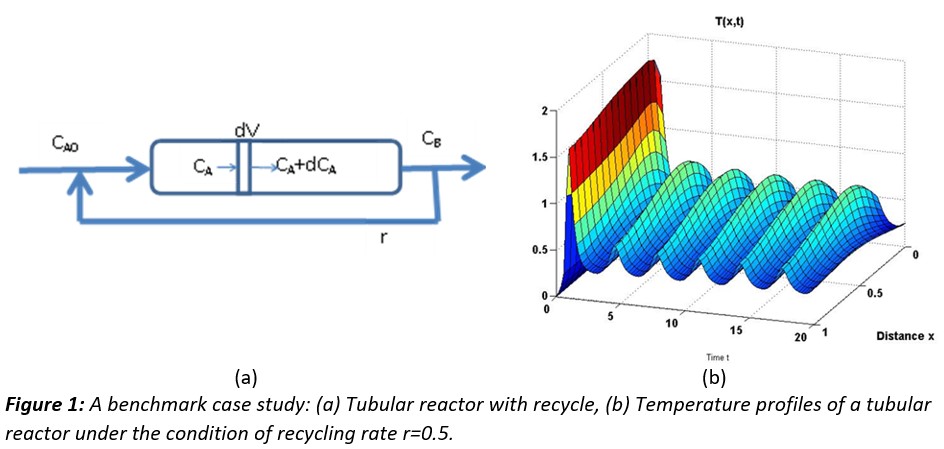
Model Predictive Control (MPC) has been widely used in process industries since the 1990s. With the MPC technique, online optimization has been performed successively in the predictive horizon and the results are used to take control action in the control horizon. In general, models in equation format are needed for MPC control. However, in reality it is often very difficult to obtain formulae for nonlinear dynamic systems with a wide range of time and spatial-scales. In order to apply MPC for nonlinear distributed-parameter large-scale systems with unknown dynamics, as a âblack-boxâ system, a data-driven model reduction-based feedforward artificial neural network (ANN) approach has been developed for MPC control. An off-line model reduction technique, the proper orthogonal decomposition (POD) method, is first applied to extract accurate non-linear low-order models from the non-linear dynamic large-scale distributed system. Then a series of successive feedforward ANNs are trained based on the time coefficients of POD basis functions to obtain the dynamic ANN models for the system. Finally, the MPC control strategy can be applied for system control using the dynamic ANN models. A benchmark case study to use cooling zones to stabilize a tubular reactor with recycle, as shown in Figure 1, will be used as an illustrative example to show this methodology.